Выберите интересующий Вас раздел
Каталог по категориям
подбор по физической величине
Каталог








Распродажа
Уцененные товары
Проектирование и сборка шкафов управления и автоматики
Клапаны
Краны
Арматура и фитинги
Насосы
Приборы контроля уровня
Электроизмерительные приборы
Электроустановочные изделия
Электрика
Пневматика и Гидравлика
Трубы, шланги, рукава
Приборы давления
Портативные приборы
Механотроника
Термодатчики
PLС, контроллеры, программируемые реле
Регуляторы и регистраторы
Расходомеры и приборы учета
Преобразователи
Таймеры, счетчики
Датчики положения
Измерители физических величин
Измерители параметров материалов и покрытий
Контроль качества воды
Электронные замки
Перечень уцененных товаров
Электронные табло
Взрывозащищенное и искробезопасное оборудование
Холодильное оборудование
Инструмент
Программное обеспечение
Товары для здоровья
Товары для дома (DIY)
Сувенирная продукция
Температура
Измерители и преобразователи
![Оборудование для котельных]() Оборудование для котельных
Оборудование для котельных
![Преобразователи температуры]() Преобразователи температуры
Преобразователи температуры
![Преобразователи температуры и влажности]() Преобразователи температуры и влажности
Преобразователи температуры и влажности
![Портативные термометры]() Термометры
Термометры
![Термогигрометры]() Термогигрометры
Термогигрометры
![Пирометры (инфракрасные термометры)]() Пирометры (инфракрасные термометры)
Пирометры (инфракрасные термометры)
![Тепловизоры]() Тепловизоры
Регуляторы
Тепловизоры
Регуляторы
![Цифровые 1-2-канальные]() Цифровые 1-2-канальные
Цифровые 1-2-канальные
![Цифровые многоканальные]() Цифровые многоканальные
Цифровые многоканальные
![Цифровые графические]() Цифровые графические
Цифровые графические
![Цифровые специализированные]() Цифровые специализированные
Цифровые специализированные
![Терморегуляторы для теплого пола]() Терморегуляторы для теплого пола
Терморегуляторы для теплого пола
![Терморегуляторы и термостаты цифровые]() Терморегуляторы и термостаты цифровые
Терморегуляторы и термостаты цифровые
![Терморегуляторы и термостаты аналоговые]() Терморегуляторы и термостаты аналоговые
Терморегуляторы и термостаты аналоговые
![Датчики температуры и влажности]() Датчики температуры и влажности
Датчики
Датчики температуры и влажности
Датчики
![Термосопротивления с коммутационной головкой]() Термосопротивления с коммутационной головкой
Термосопротивления с коммутационной головкой
![Термосопротивления с интерфейсом RS-485]() Термосопротивления с интерфейсом RS-485
Термосопротивления с интерфейсом RS-485
![Датчики температуры PTС, NTC, ХА(К), ЖК(J), 50М, Pt100 по чертежам и эскизам]() Датчики температуры PTС, NTC, ХА(К), ЖК(J), 50М, Pt100 по чертежам и эскизам
Датчики температуры PTС, NTC, ХА(К), ЖК(J), 50М, Pt100 по чертежам и эскизам
![Термокомплектующие]() Термокомплектующие
Термокомплектующие
![Провода компенсационные]() Провода компенсационные
Провода компенсационные
![Провода соединительные]() Провода соединительные
Провода соединительные
![Датчики температуры для терморегуляторов и термостатов для теплого пола]() Датчики температуры для терморегуляторов и термостатов для теплого пола
Вспомогательные устройства
Датчики температуры для терморегуляторов и термостатов для теплого пола
Вспомогательные устройства
![Термокомплектующие]() Термокомплектующие
Термокомплектующие
Влажность
Давление
Измерители
![Вакуумметры]() Вакуумметры
Вакуумметры
![Мановакуумметры]() Мановакуумметры
Измерители и преобразователи
Мановакуумметры
Измерители и преобразователи
![Манометры]() Манометры
Манометры
![Портативные манометры]() Портативные манометры
Портативные манометры
![Вакуумметры]() Вакуумметры
Вакуумметры
![Мановакуумметры]() Мановакуумметры
Мановакуумметры
![Цифровые измерители давления]() Цифровые измерители давления
Цифровые измерители давления
![Тягонапоромеры]() Тягонапоромеры
Тягонапоромеры
![Вспомогательные устройства]() Вспомогательные устройства
Вспомогательные устройства
![Преобразователи давления (датчики)]() Преобразователи давления (датчики)
Регуляторы
Преобразователи давления (датчики)
Регуляторы
![Датчики реле давления]() Датчики реле давления
Датчики реле давления
![Цифровые 1-2-канальные]() Цифровые 1-2-канальные
Цифровые 1-2-канальные
![Цифровые многоканальные]() Цифровые многоканальные
Цифровые многоканальные
![Терморегуляторы и термостаты аналоговые]() Терморегуляторы и термостаты аналоговые
Терморегуляторы и термостаты аналоговые
Уровень
Свет и освещенность
Радиоактивность
Вес, масса
Линейные размеры
Измерители
![Дальномеры]() Дальномеры
Дальномеры
Электрические параметры
Измерители и преобразователи
![Аналоговые измерители]() Аналоговые измерители
Щитовые измерители
Аналоговые измерители
Щитовые измерители
![Амперметры]() Амперметры
Амперметры
![Вольтметры]() Вольтметры
Вольтметры
![Частотомер]() Частотомер
Частотомер
![Ваттметры]() Ваттметры
Ваттметры
![Измерители COS F]() Измерители COS F
Измерители COS F
![Комбинированные приборы однофазные]() Комбинированные приборы однофазные
Комбинированные приборы однофазные
![Анализаторы качества электроэнергии]() Анализаторы качества электроэнергии
Анализаторы качества электроэнергии
![Анализаторы мощности]() Анализаторы мощности
Анализаторы мощности
![Преобразователи напряжения]() Преобразователи напряжения
Портативные измерители
Преобразователи напряжения
Портативные измерители
![Измерители сопротивления]() Измерители сопротивления
Измерители сопротивления
![Токовые клещи]() Токовые клещи
Токовые клещи
![Мультиметры, тестеры]() Мультиметры, тестеры
Мультиметры, тестеры
![Трассоискатели, детекторы]() Трассоискатели, детекторы
Трассоискатели, детекторы
Расход жидкостей и газов
Параметры газов и жидкостей
Параметры материалов и покрытий
Время, счетчики
Другое
Температура
Влажность
Давление
Уровень
Свет и освещенность
Звук и шум
Радиоактивность
Вес, масса
Линейные размеры
Электрические параметры
Расход жидкостей и газов
Параметры газов и жидкостей
Параметры материалов и покрытий
Время, счетчики
Другое
Драйверы шаговых двигателей MEYERTEC MST
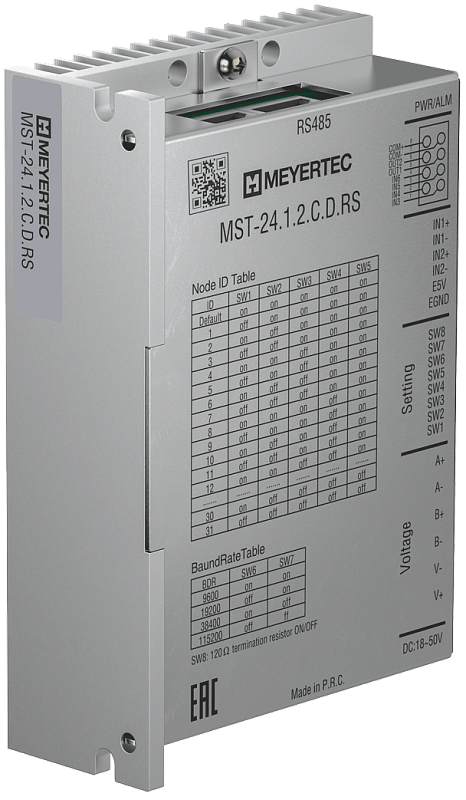



Драйверы серии MST предназначены для управления шаговыми двигателями
- Питание: ~18...80 В, =18...50 В, =18...110 В
- Интерфейс RS-485 Modbus (RTU)
- Степень пылевлагозащиты: IP20
x
Цену, наличие на складе и сроки поставки можно узнать у менеджера

Для уточнения цены Вы можете позвонить по номерам +7 (812) 327-32-74 или 928-3274
Доставка по РоссииСпособы оплаты
Драйверы серии MST предназначены для управления шаговыми двигателями. Драйвер получает сигналы от контроллера и генерирует электрические импульсы для управления обмотками двигателя, обеспечивая его движение с заданным шагом. При этом драйвер регулирует ток для оптимальной работы, предотвращая перегрев и минимизируя потери.
Особенности:
- Наличие интерфейса RS-485.
- Возможность управления двухфазными и трехфазными шаговыми двигателями.
- Встроенный S-образный профиль кривой разгона/торможения.
- Возможность настройки параметров разгона и параметров торможения отдельно.
- Конфигурация и настройка режимов работы прибора и параметров управления с помощью программного конфигуратора.
- Возможность управления шаговым двигателем с обратной связью (серворежим).
- Наличие трех режимов управления:
- посредством внешних дискретных сигналов (режим IO);
- по интерфейсу RS-485 (Modbus RTU)
Примеры применений:Системы этикетировки и упаковки. Используются в конвейерных системах для точного позиционирования этикетки или самой продукции для упаковки.
Преимущества:
Преимущества:
Преимущества:
Преимущества:
Преимущества:
- не требуют обратной связи для контроля положения, что упрощает систему и повышает ее надежность
- высокая точность позиционирования исполнительных механизмов
Преимущества:
- Надежность и простота управления движением на небольшие расстояния.
- Экономичность для задач с низкими требованиями к скорости.
Преимущества:
- Высокая точность для задач, где не требуется высокая скорость.
- Отсутствие необходимости в датчиках положения, что упрощает систему.
Преимущества:
- Высокая точность позиционирования в малых областях.
- Простота интеграции в системы с фиксированными траекториями движения.
Технические характеристики:
| Параметр | MST-24 | MST-34 | |
| Электропитание | |||
| Напряжение питания Uпит (клеммы V+, V-) | постоянного тока | 18...50 В | 18...110 В |
| переменного тока (50 Гц) | - | 18...80 В | |
| Выходные характеристики | |||
| Максимальный ток фазы двигателя (амплитудное значение) на клеммах A+, A-, B+, B- | 6 А | 8 А | |
| Нагрузочная способность выхода для питания внешнего энкодера (клеммы E5V, EGND) | 5 В, 150 мА | ||
| Дискретные входы | |||
| Дискретные входы для приема дифференциального сигнала (клеммы IN1, IN2) | Максимальная частота принимаемых внешних импульсов | 200 кГц | |
| Количество | 2 | ||
| Тип | изолированные оптопары | ||
| Дискретные входы с общим проводом (клеммы IN3...IN6) | Количество | 4 | |
| Тип | оптопары с общим проводом | ||
| Максимальное входное напряжение постоянного тока | 24 В | ||
| Аналоговые входы | |||
| Аналоговый вход для подключения внешнего потенциометра | Количество | - | 1 |
| Номинальное сопротивление подключаемого потенциометра | 10...100 кОм | ||
| Дискретные выходы | |||
| Количество | 2 | ||
| Максимально допустимый постоянный ток | 150 мА | ||
| Максимально допустимое напряжение постоянного тока | 30 В | ||
| Интерфейс RS-485 | |||
| Протокол | Modbus (RTU) | ||
| Скорость обмена | 9600, 19200, 38400, 115200 бит/с | ||
| Встроенный отключаемый согласующий резистор шины | 120 Ом | ||
| Корпус | |||
| Степень защиты корпуса | IP20 | ||
| Функциональная схема прибора |
 |
| Модификации |
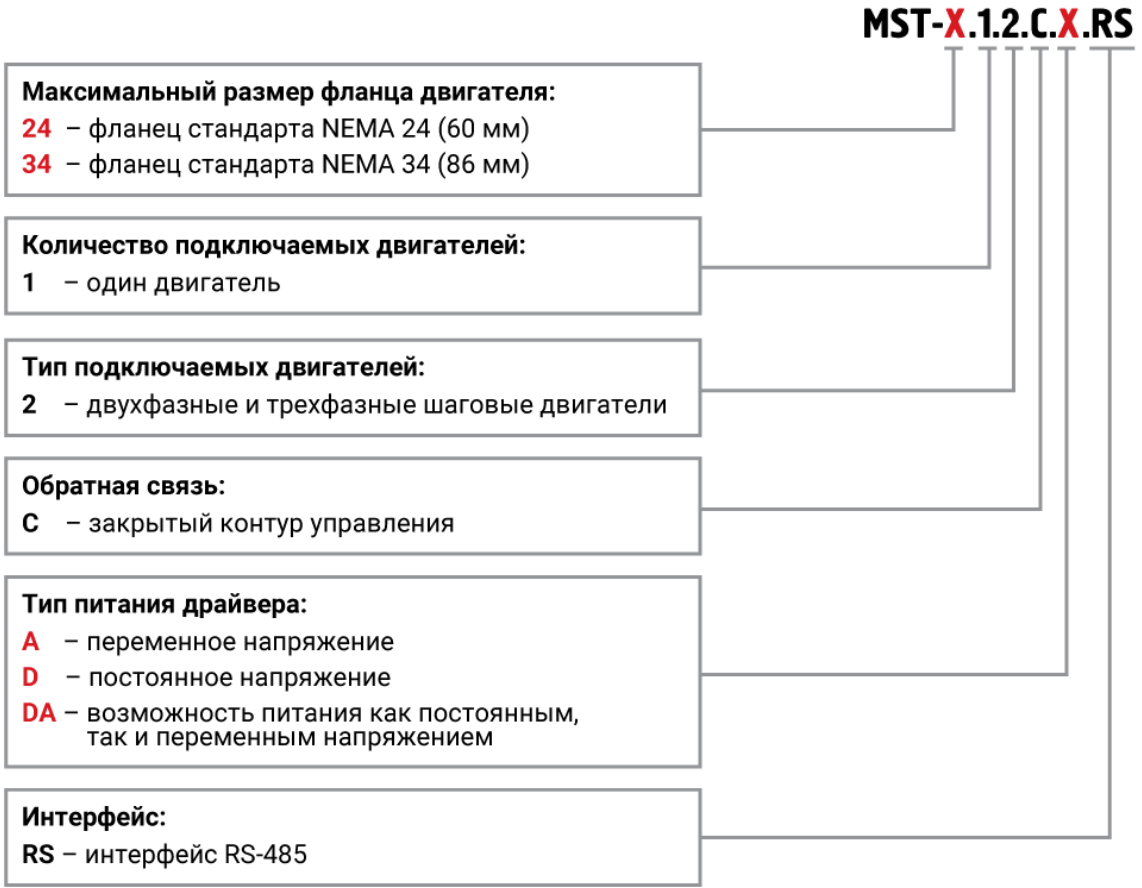 |
| Габаритные и присоединительные размеры | ||
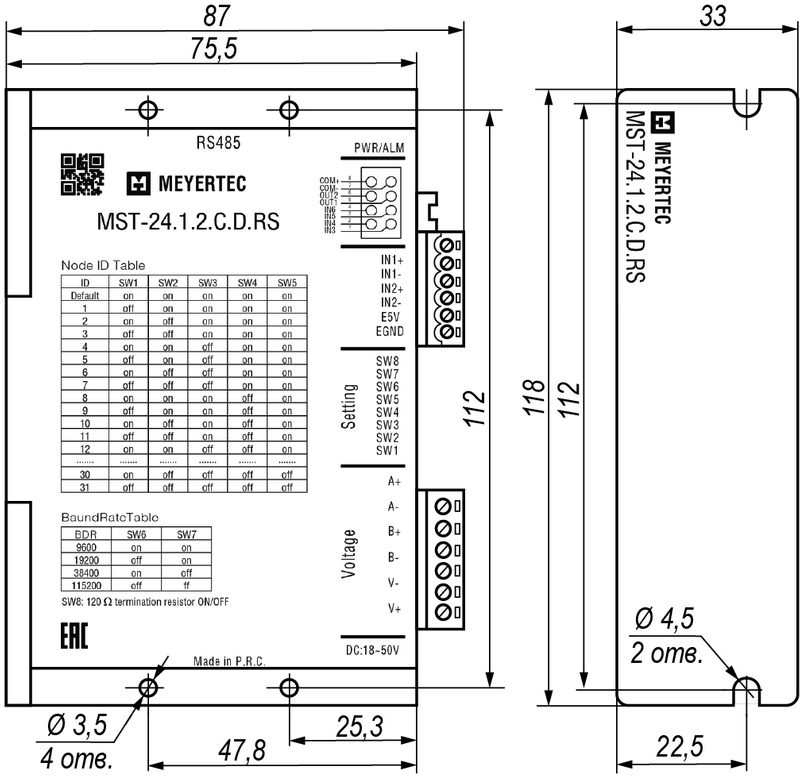
MST-24.1.2.С.D.RS | 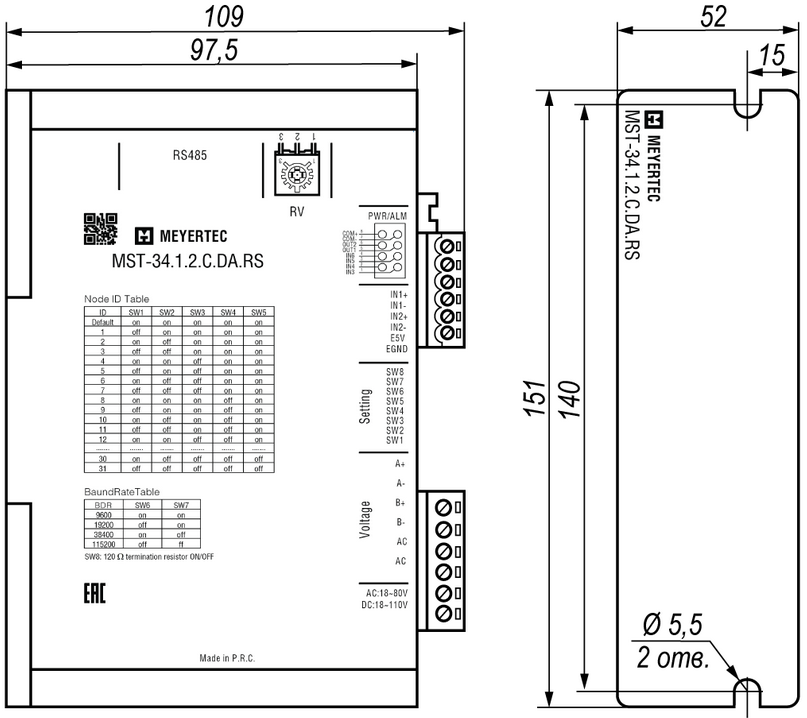
MST-34.1.2.C.DA.RS | |
| Схемы подключения | ||
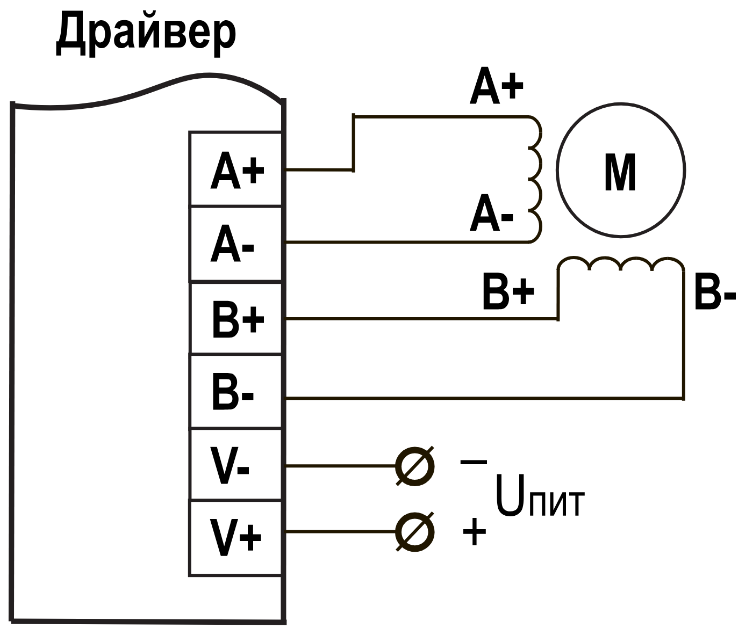
Схема подключения к прибору электропитания и двухфазного шагового двигателя | 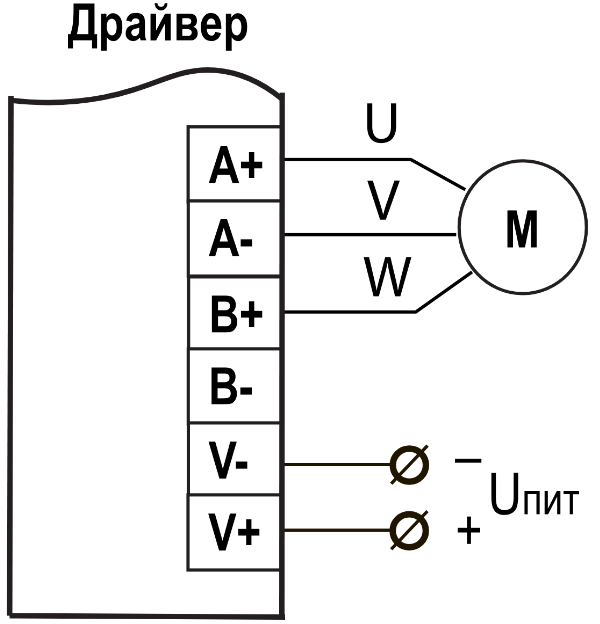
Схема подключения к прибору электропитания и трехфазного шагового двигателя | 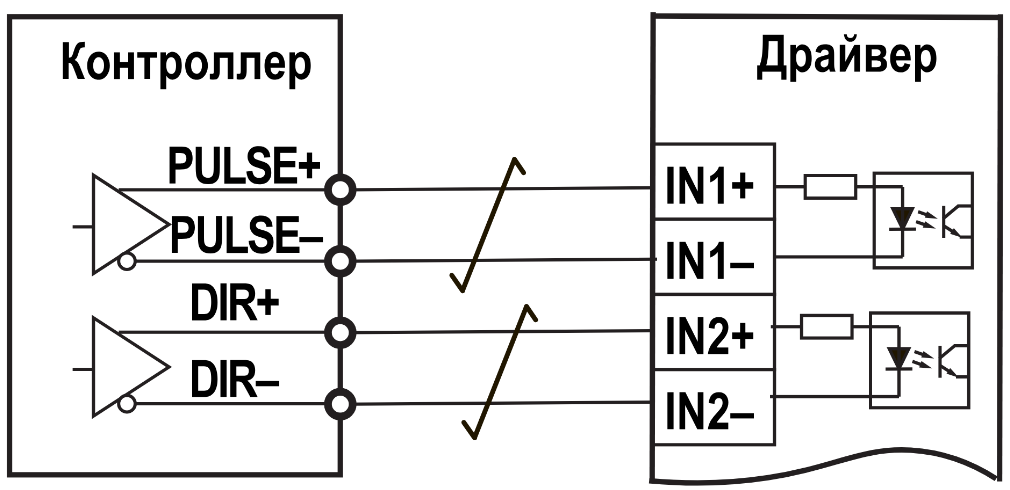
Схема подключения к дискретным входам IN1, IN2 для приема дифференциальных сигналов внешних импульсов |
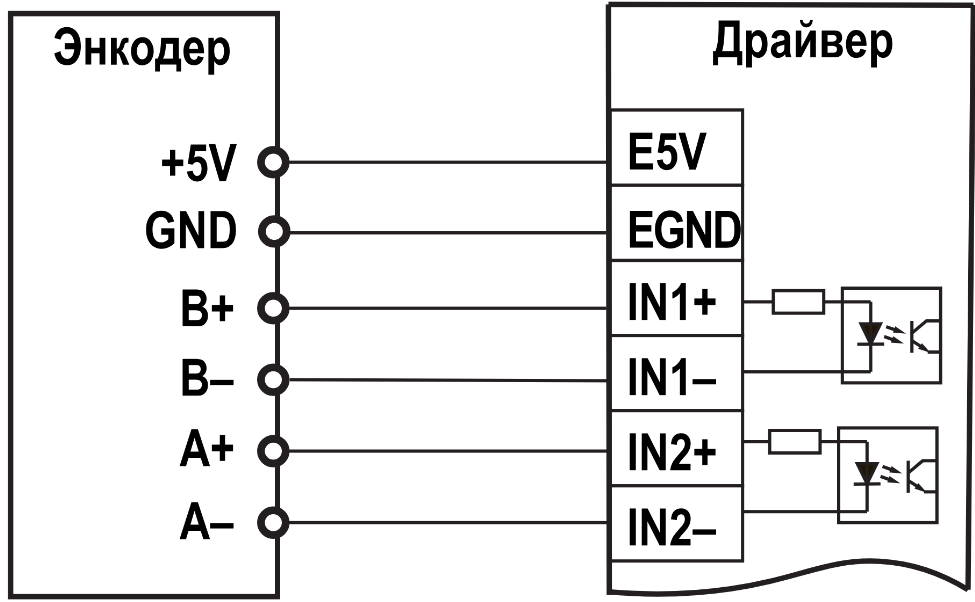
Схема подключения квадратурного энкодера к дискретным входам IN1, IN2 | 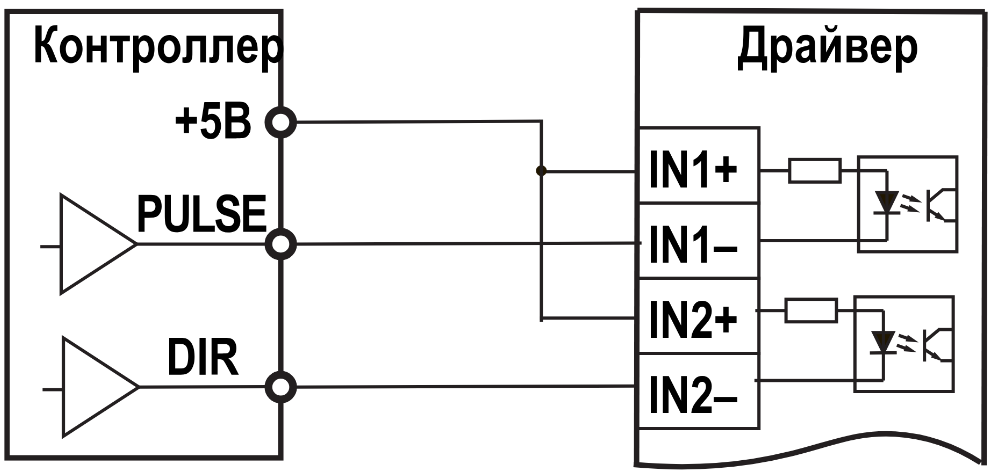
Схема подключения к дискретным входам IN1, IN2 несимметричных сигналов напряжением 5 В | 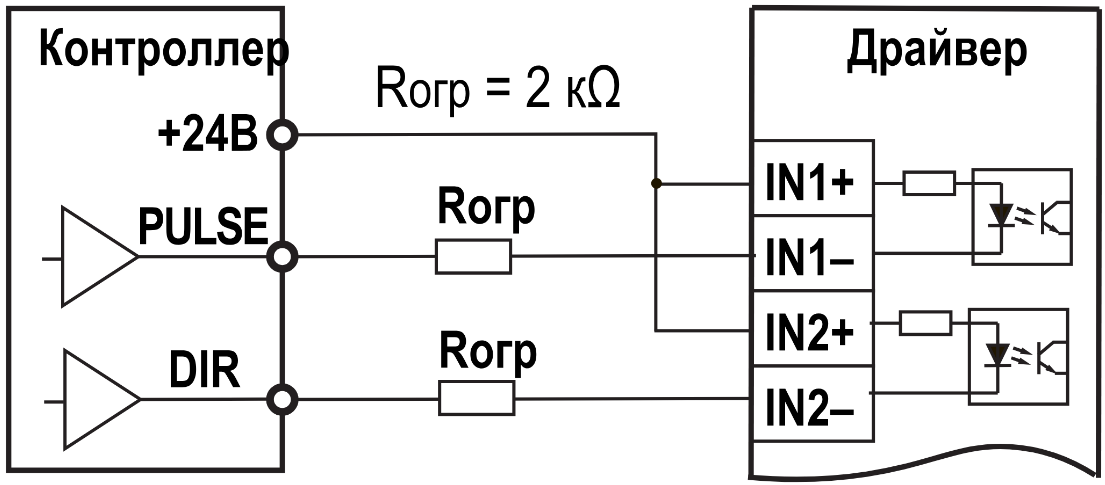
Схема подключения к дискретным входам IN1, IN2 несимметричных сигналов напряжением 24 В с использованием ограничительного резистора Rогр |
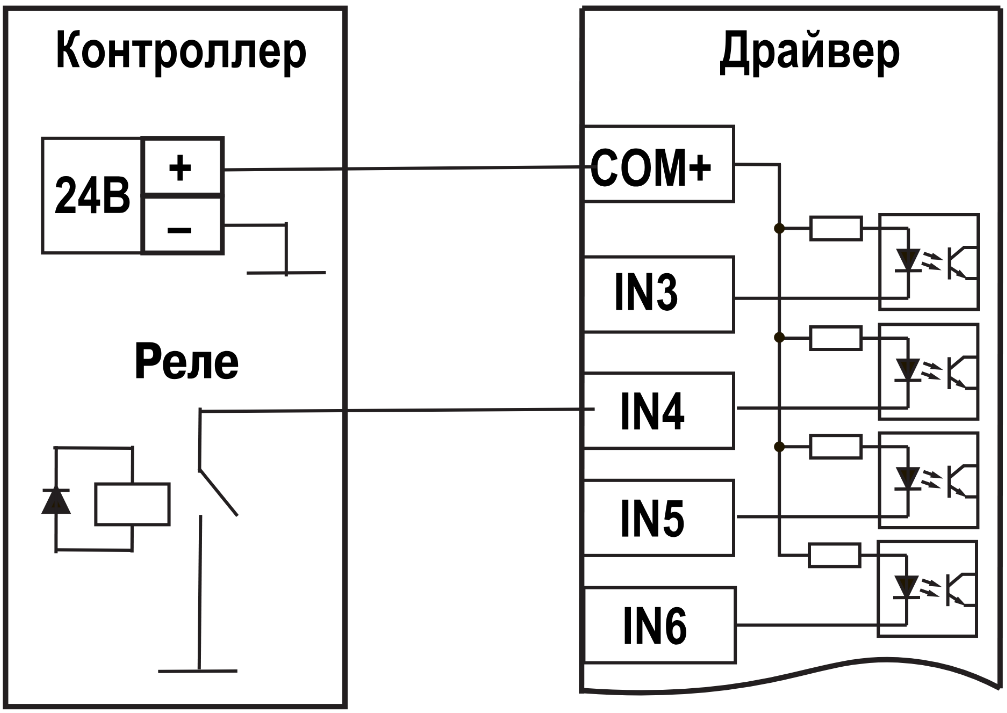
Схема подключения сигналов релейных выходов к дискретным входам IN3...IN6 | 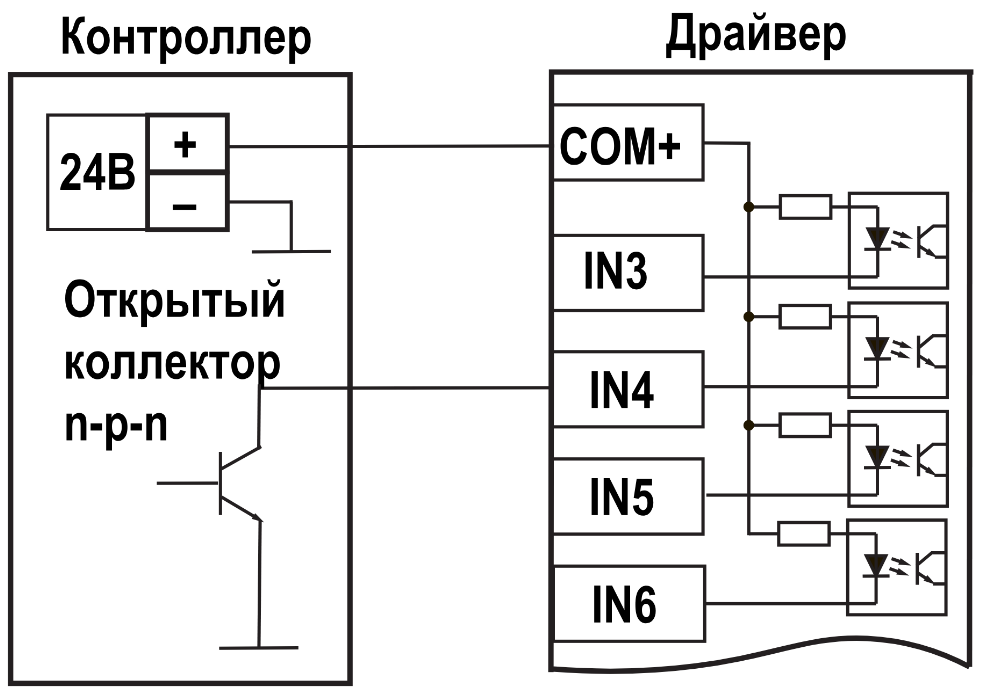
Схема подключения выходных сигналов типа открытый коллектор (n-p-n) к дискретным входам IN3...IN6 | 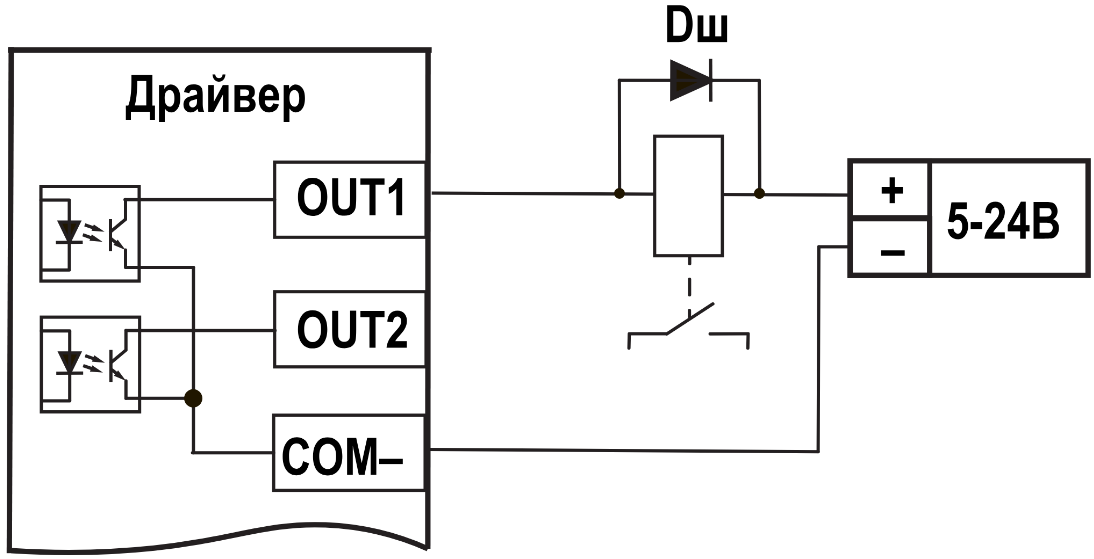
Схема подключения релейной нагрузки к дискретным выходам OUT1 и OUT2 |
Версия: 2026-04-10-СДГ
Отзывы на этот товар пока отсутствуют.
Сопутствующие товары
Просмотренные товары
